
жң¬ж–ҮиҪ¬иҪҪиҮӘе…¬дј—еҸ·жҖқзқҝе’ЁиҜў
1 еј•иЁҖ
з»ҙдҝ®жҖ§дҪңдёәдә§е“Ғзҡ„дёҖйЎ№йҖҡз”ЁиҙЁйҮҸзү№жҖ§пјҢеҜ№дәҺжӯҰеҷЁиЈ…еӨҮе°ӨдёәйҮҚиҰҒпјҢе®ғеҝ…йЎ»еңЁдә§е“Ғе…ЁеҜҝе‘Ҫе‘ЁжңҹдәҲд»ҘиҖғиҷ‘пјҢе…¶е·ҘдҪңеҶ…е®№еҢ…жӢ¬и®ҫи®Ўйҳ¶ж®өејҖе§Ӣзҡ„з»ҙдҝ®жҖ§и®ҫи®ЎеҲҶжһҗе’ҢйӘҢиҜҒиҜ„дј°пјҢз ”еҲ¶еҗҺжңҹзҡ„з»ҙдҝ®жҠҖжңҜжүӢеҶҢзј–еҶҷпјҢд»ҘеҸҠдәӨд»ҳеүҚејҖеұ•зҡ„з»ҙдҝ®и®ӯз»ғзӯүгҖӮ
дҪҶеңЁдј з»ҹзҡ„з»ҙдҝ®жҖ§е·ҘдҪңжЁЎејҸдёӢпјҢз»ҙдҝ®жҖ§еҲҶжһҗиҜ„дј°дҫқиө–дәҺзү©зҗҶж ·жңәпјҢиҮҙдҪҝз»ҙдҝ®зјәйҷ·еҸ‘зҺ°еҫ—зӣёеҜ№иҫғжҷҡпјҢиҖҢдё”з»ҙдҝ®жҖ§еҲҶжһҗеӨҡйҮҮз”ЁжүӢеҠЁж“ҚдҪңгҖҒеҮӯз»ҸйӘҢеҲӨж–ӯзҡ„ж–№ејҸиҝӣиЎҢиҜ„дј°пјҢеҜјиҮҙеҫҲеӨҡз»ҙдҝ®жҖ§зјәйҷ·иў«еёҰе…ҘжңҖз»Ҳдә§е“ҒгҖӮ
иҷҡжӢҹз»ҙдҝ®жҠҖжңҜеҸҜд»ҘжҸҗдҫӣе…·жңүиүҜеҘҪжІүжөёж„ҹгҖҒдәӨдә’жҖ§е’ҢеҗҜеҸ‘жҖ§зҡ„иҷҡжӢҹз»ҙдҝ®зҺҜеўғпјҢдҪҝи®ҫи®ЎиҖ…иғҪжӣҙж—©зҡ„вҖңзңӢеҲ°гҖҒдҝ®еҲ°е’Ңз”ЁеҲ°вҖқжңӘжқҘзҡ„дә§е“ҒпјҢ并йҖҡиҝҮиҷҡжӢҹж“ҚдҪңе’Ңз»ҙдҝ®иҝҮзЁӢд»ҝзңҹиҝӣиЎҢз»ҙдҝ®жҖ§еҲҶжһҗдёҺйӘҢиҜҒпјҢеҸҜд»ҘеңЁдә§е“Ғи®ҫи®Ўзҡ„ж—©жңҹйҳ¶ж®өеҸ‘зҺ°еӯҳеңЁзҡ„з»ҙдҝ®жҖ§и®ҫи®Ўзјәйҷ·пјҢд»ҺиҖҢйҒҝе…Қз»ҙдҝ®е·ҘдҪңеңЁж—¶й—ҙдёҠзҡ„ж»һеҗҺгҖӮеўһејәиЈ…еӨҮеҜҝе‘Ҫе‘Ёжңҹеҗ„йҳ¶ж®өе…ідәҺз»ҙдҝ®зҡ„еҗ„з§ҚеҶізӯ–иғҪеҠӣпјҢеҢ…жӢ¬з»ҙдҝ®жҖ§и®ҫи®ЎеҲҶжһҗгҖҒз»ҙдҝ®жҖ§жј”зӨәйӘҢиҜҒгҖҒз»ҙдҝ®иҝҮзЁӢж ёжҹҘгҖҒз»ҙдҝ®и®ӯз»ғе®һж–ҪзӯүгҖӮ

2 иҷҡжӢҹз»ҙдҝ®жҠҖжңҜеҸ‘еұ•жҰӮиҝ°
д»Һ 80 е№ҙд»ЈдёӯеҗҺжңҹиө·пјҢйҡҸзқҖиҷҡжӢҹзҺ°е®һжҠҖжңҜзҡ„е……еҲҶеҸ‘еұ•дёҺеә”з”ЁпјҢиҷҡжӢҹз»ҙдҝ®жҠҖжңҜзҡ„з ”з©¶иҺ·еҫ—дәҶе·ЁеӨ§зҡ„жҲҗеҠҹгҖӮжҜ”иҫғжңүд»ЈиЎЁжҖ§зҡ„жЎҲдҫӢжңүпјҡзҫҺеӣҪе“ҲеӢғжңӣиҝңй•ңпјҲHSTпјүзҡ„иҷҡжӢҹз»ҙдҝ®и®ӯз»ғгҖҒжҙӣе…ӢеёҢеҫ·й©¬дёҒе…¬еҸёзҡ„F-16йЎ№зӣ®зҡ„з»ҙдҝ®жҖ§и®ҫи®ЎеҲҶжһҗиҝҮзЁӢгҖҒзҫҺеӣҪз©әеҶӣйҳҝе§Ҷж–Ҝзү№жң—е®һйӘҢе®ӨпјҲArmstrong Lab.пјүдёҺе®ҫеӨ•жі•е°јдәҡеӨ§еӯҰиҒ”еҗҲејҖеҸ‘зҡ„DEPTHпјҲDesign Evaluation for Personnel Training and Human Factorsпјүд»ҘеҸҠж–°еҠ еқЎеҚ—жҙӢзҗҶе·ҘеӨ§еӯҰз ”з©¶ејҖеҸ‘зҡ„ V-REALISM з»ҙдҝ®еҹ№и®ӯзі»з»ҹзӯүгҖӮжӯӨеӨ–пјҢеҢ—дә¬иҲӘз©әиҲӘеӨ©еӨ§еӯҰзҡ„иҷҡжӢҹзҺ°е®һжҠҖжңҜеӣҪ家йҮҚзӮ№е®һйӘҢе®ӨгҖҒжөҷжұҹеӨ§еӯҰCAD&CGеӣҪ家йҮҚзӮ№е®һйӘҢе®Өе’ҢеҶӣжў°е·ҘзЁӢеӯҰйҷўзӯүеңЁз»ҙдҝ®иҝҮзЁӢе»әжЁЎгҖҒиҷҡжӢҹж ·жңәе»әжЁЎгҖҒз»ҙдҝ®еҠЁдҪңд»ҝзңҹд»ҘеҸҠиҷҡжӢҹдәӨдә’зӯүж–№йқўејҖеұ•дәҶеӨ§йҮҸзҡ„з ”з©¶пјҢ并еҸ–еҫ—дәҶдёҖе®ҡзҡ„з ”з©¶жҲҗжһңгҖӮ
3 иҷҡжӢҹз»ҙдҝ®зі»з»ҹжһ¶жһ„
иҷҡжӢҹз»ҙдҝ®зі»з»ҹдёҖиҲ¬йҮҮз”Ёе®ўжҲ·з«ҜпјҲClientпјүвҖ”жңҚеҠЎеҷЁпјҲServerпјүз»“жһ„пјҲC/Sжһ¶жһ„пјүгҖӮжңҚеҠЎеҷЁз«Ҝз”ұдёҖеҸ°й«ҳжҖ§иғҪжңҚеҠЎеҷЁжһ„жҲҗпјҢе®ўжҲ·з«Ҝз”ұжІүжөёејҸиҷҡжӢҹз»ҙдҝ®з»Ҳз«ҜгҖҒиҜӯйҹіиҜҶеҲ«/еҗҲжҲҗз»Ҳз«ҜгҖҒе»әжЁЎз®ЎзҗҶз»Ҳз«ҜгҖҒз»ҙдҝ®еҲҶжһҗз»Ҳз«Ҝе’ҢжҺ§еҲ¶/и§Ӯж‘©з»Ҳз«Ҝзӯүдә”йғЁеҲҶжһ„жҲҗгҖӮе®ўжҲ·з«Ҝзҡ„еҗ„дёӘз»Ҳз«ҜйҖҡиҝҮTCP/IPеҚҸи®®еҗ‘жңҚеҠЎеҷЁз«ҜеҸ‘йҖҒд»»еҠЎеӨ„зҗҶиҜ·жұӮпјҢжңҚеҠЎеҷЁз«ҜиҝӣиЎҢдёҖзі»еҲ—еӨ„зҗҶеҗҺе°Ҷз»“жһңеҸҚйҰҲз»ҷеҗ„з»Ҳз«ҜпјҢеҰӮдёӢеӣҫжүҖзӨәгҖӮ
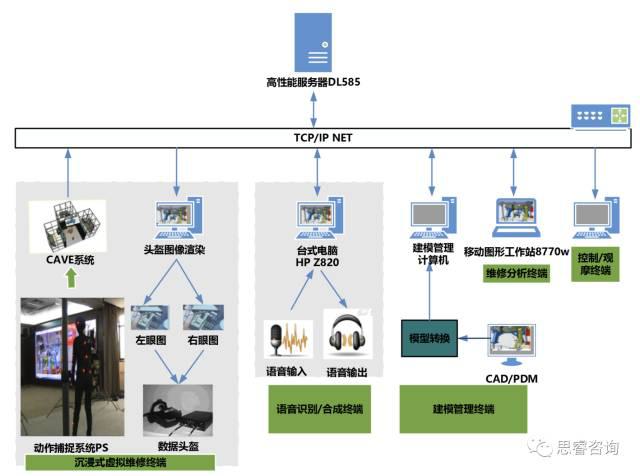
1) жІүжөёејҸиҷҡжӢҹз»ҙдҝ®з»Ҳз«Ҝ
жІүжөёејҸиҷҡжӢҹз»ҙдҝ®з»Ҳз«Ҝз”ұжҚ•жҚүеӨ„зҗҶе’ҢеӨҙзӣ”еӣҫеғҸжёІжҹ“дёӨйғЁеҲҶз»„жҲҗпјҢжҚ•жҚүеӨ„зҗҶи®Ўз®—жңәзҡ„дҪңз”ЁжҳҜпјҡе®һж—¶жҚ•жҚүдәәдҪ“еҗ„дёӘйғЁдҪҚзҡ„ж–№дҪҚпјҢиҪ¬жҚўдёәдәәдҪ“е§ҝжҖҒж•°жҚ®гҖӮеӨҙзӣ”еӣҫеҪўжёІжҹ“и®Ўз®—жңәзҡ„дҪңз”ЁжҳҜпјҡжҺҘ收жҚ•жҚүеҫ—еҲ°зҡ„дёүз»ҙдәәдҪ“е§ҝжҖҒж•°жҚ®гҖҒз»“еҗҲз»ҙдҝ®еңәжҷҜзҡ„ж•°жҚ®пјҢиҝӣиЎҢдёүз»ҙеӣҫеҪўеӣҫеғҸжёІжҹ“гҖӮ
2) иҜӯйҹіиҜҶеҲ«/еҗҲжҲҗз»Ҳз«Ҝ
иҜӯйҹіиҜҶеҲ«/еҗҲжҲҗз»Ҳз«Ҝз”ұиҜӯйҹіиҫ“е…Ҙи®ҫеӨҮгҖҒиҜӯйҹіиҫ“еҮәи®ҫеӨҮд»ҘеҸҠеӨ„зҗҶиҜӯйҹідҝЎжҒҜзҡ„и®Ўз®—жңәдёүйғЁеҲҶжһ„жҲҗгҖӮиҜӯйҹіиҜҶеҲ«/еҗҲжҲҗз»Ҳз«Ҝзҡ„дҪңз”ЁжҳҜе°Ҷз”ЁжҲ·зҡ„иҜӯйҹідҝЎеҸ·иҪ¬жҚўдёәеҸҜиў«и®Ўз®—жңәиҜҶеҲ«зҡ„иҜӯйҹізү№еҫҒдҝЎжҒҜпјҢ并е°Ҷи®Ўз®—жңәеӨ„зҗҶеҫ—еҲ°зҡ„йңҖиҰҒеҸҚйҰҲз»ҷз”ЁжҲ·зҡ„иҜӯйҹідҝЎжҒҜд»ҘеЈ°йҹізҡ„еҪўејҸиЎЁиҫҫеҮәжқҘгҖӮ
3) е»әжЁЎз®ЎзҗҶз»Ҳз«Ҝ
е»әжЁЎз®ЎзҗҶз»Ҳз«Ҝдё»иҰҒз”ұе»әжЁЎз®ЎзҗҶи®Ўз®—жңәгҖҒе»әжЁЎз®ЎзҗҶзЁӢеәҸе’ҢжЁЎеһӢиҪ¬жҚўзЁӢеәҸз»„жҲҗгҖӮдҪңз”ЁжҳҜпјҡжҺҘ收жқҘиҮӘCAD/ PDMиҪҜ件зҡ„дә§е“Ғдёүз»ҙж•°еӯ—жЁЎеһӢе’Ңдә§е“Ғз»“жһ„ж•°жҚ®гҖӮйҖҡиҝҮжЁЎеһӢиҪ¬жҚўеӨ„зҗҶпјҢз”ҹжҲҗжЁЎеһӢеә“ж•°жҚ®е№¶еӯҳеӮЁеҲ°жңҚеҠЎеҷЁгҖӮеҗҢж—¶пјҢйҖҡиҝҮйҖүжӢ©жЁЎеһӢе’Ңе®ҡд№үзәҰжқҹпјҢз”ҹжҲҗз»ҙдҝ®еңәжҷҜеә“ж•°жҚ®е№¶еӯҳеӮЁеҲ°жңҚеҠЎеҷЁгҖӮйҖҡиҝҮйҖүжӢ©еңәжҷҜе’Ңйў„и®ҫз»ҙдҝ®иҝҮзЁӢпјҢз”ҹжҲҗз»ҙдҝ®д»»еҠЎеә“ж•°жҚ®е№¶еӯҳеӮЁеҲ°жңҚеҠЎеҷЁгҖӮ
4) з»ҙдҝ®еҲҶжһҗз»Ҳз«Ҝ
з»ҙдҝ®еҲҶжһҗз»Ҳз«Ҝдё»иҰҒжҳҜз»ҙдҝ®еҲҶжһҗи®Ўз®—жңәе’Ңз»ҙдҝ®еҲҶжһҗиҪҜ件гҖӮжң¬йғЁеҲҶзҡ„дҪңз”ЁжҳҜпјҡи®°еҪ•иҷҡжӢҹз»ҙдҝ®иҝҮзЁӢгҖҒз»ҙдҝ®йҡңзўҚеҲҶжһҗгҖҒз»ҙдҝ®ж—¶й—ҙеҲҶжһҗгҖҒз»ҙдҝ®з©әй—ҙеҲҶжһҗзӯүгҖӮ
5) жҺ§еҲ¶/и§Ӯж‘©з»Ҳз«Ҝ
жҺ§еҲ¶/и§Ӯж‘©з»Ҳз«Ҝз”ұеӣҫеҪўжёІжҹ“и®Ўз®—жңәеҸҠзӣёеә”иҪҜ件组жҲҗгҖӮжң¬йғЁеҲҶзҡ„дҪңз”ЁжҳҜпјҡжҺ§еҲ¶з»ҙдҝ®жЁЎжӢҹд»»еҠЎзҡ„ејҖе§Ӣ/з»“жқҹ/жҡӮеҒңпјҢжңүе…ідәәе‘ҳиЎҢдёәпјҢ并且жҸҗдҫӣеҜ№дәҺз»ҙдҝ®еңәжҷҜзҡ„е®һж—¶жҳҫзӨәе’ҢеӣҫеҪўи§’еәҰеҸҳжҚўгҖӮ
4 иҷҡжӢҹз»ҙдҝ®е»әжЁЎдёҺд»ҝзңҹ
4.1иҷҡжӢҹз»ҙдҝ®жЁЎеһӢжһ„е»ә
дә§е“ҒиҷҡжӢҹз»ҙдҝ®е·ҘдҪңзҡ„ж ·жңәе»әжЁЎд»ҘCADжЁЎеһӢж•°жҚ®жҲ–е…¶д»–ж јејҸзҡ„з”өеӯҗж ·жңәдёәеҹәзЎҖпјҢз»“еҗҲйӣ¶йғЁд»¶иЈ…й…Қе…ізі»е’Ңз»ҙдҝ®йңҖиҰҒпјҢе°Ҷдә§е“Ғзҡ„е°әеҜёгҖҒиҒ”жҺҘгҖҒзәҰжқҹе…ізі»е’Ңз»ҙдҝ®иҝҮзЁӢжЁЎеһӢз»јеҗҲеҲ°иҷҡжӢҹз»ҙдҝ®ж ·жңәдёӯпјҢеңЁиҷҡжӢҹд»ҝзңҹд№ӢеүҚе®ҢжҲҗзӣёеә”жЁЎеһӢзҡ„иҷҡжӢҹж ·жңәжһ„е»әпјҢиҝҷдёҖиҝҮзЁӢдёӯдё»иҰҒж¶үеҸҠжЁЎеһӢзҡ„ж јејҸиҪ¬жҚўеҸҠжЁЎеһӢз®ҖеҢ–гҖҒдәәдҪ“жЁЎеһӢжһ„е»әгҖҒз»ҙдҝ®дҝқйҡңе·Ҙе…·е»әжЁЎгҖҒиҷҡжӢҹз»ҙдҝ®зү№еҫҒеҠ е…ҘпјҢд»ҺиҖҢдёәиҷҡжӢҹеңәжҷҜзҡ„жһ„е»әжҸҗдҫӣжқЎд»¶гҖӮ
1) з”өеӯҗж ·жңәзҡ„ж•°жҚ®иҪ¬жҚў
зҺ°йҳ¶ж®өеҲ¶дҪңз”өеӯҗж ·жңәж—¶жңүдёҚеҗҢзҡ„жһ„е»әзҺҜеўғпјҢеҰӮUGгҖҒPro/EзӯүпјҢжңҖеҗҺзҡ„ж ·жңәж јејҸдёҚеҗҢпјҢз”өеӯҗж ·жңәзҡ„ж•°жҚ®иҪ¬жҚўжҠҖжңҜеҸҜд»Ҙе°ҶеҗҢдёҖжЁЎеһӢж–Ү件еңЁдёҚеҗҢзҡ„иҪҜ件дёӯдҪҝз”ЁпјҢеҲ©з”ЁиҜҘжҠҖжңҜеўһејәзҡ„з”өеӯҗж ·жңәзҡ„еҸҜз”ЁжҖ§пјҢеҮҸиҪ»дәҶз”өеӯҗж ·жңәзҡ„йҮҚеӨҚеҲ¶дҪңе·ҘдҪңпјҢдёәжӣҙеҘҪзҡ„еҲ©з”Ёз”өеӯҗж ·жңәжҸҗдҫӣж”ҜжҢҒгҖӮ

2) дәәдҪ“жЁЎеһӢжһ„е»ә
иҷҡжӢҹз»ҙдҝ®е·ҘдҪңзҡ„дәәдҪ“жЁЎеһӢе»әжЁЎеңЁDELMIAзҡ„Human Builderдёӯе®ҢжҲҗпјҢеңЁиҝӣиЎҢе»әжЁЎе·ҘдҪңеүҚпјҢйңҖиҰҒеҜ№е®һйҷ…зҡ„з»ҙдҝ®е·ҘдҪңдәәе‘ҳиҝӣиЎҢзӣёеә”е°әеҜёзҡ„жөӢйҮҸпјҢ并еңЁе»әжЁЎиҝҮзЁӢдёӯе°Ҷе°әеҜёеҮҶзЎ®еҸҚжҳ еҲ°дәәдҪ“жЁЎеһӢдёӯпјҢзү№еҲ«жҳҜеүҚиҮӮгҖҒжүӢйғЁгҖҒдёӢиӮўгҖҒеӨҙйғЁиҝҷдәӣеҜ№з»ҙдҝ®е·ҘдҪңжңүеҪұе“Қзҡ„йғЁдҪҚгҖӮеҰӮжһңжңүеӨҡдёӘдәәе‘ҳиҝӣиЎҢж“ҚдҪңпјҢйңҖиҰҒеҜ№дёҚеҗҢе°әеҜёзҡ„дәәдҪ“жЁЎеһӢеҲҶеҲ«иҝӣиЎҢе»әжЁЎгҖӮ
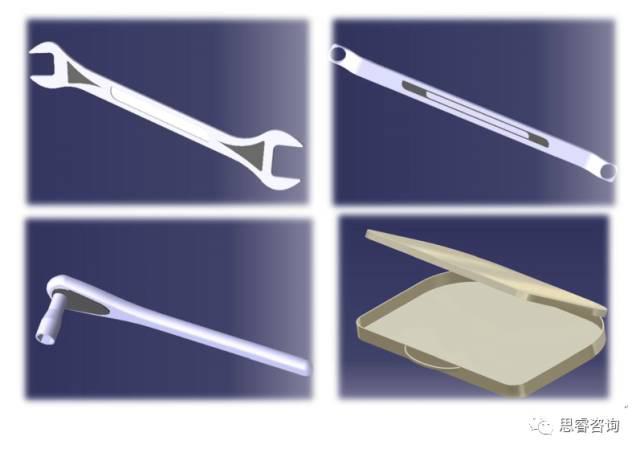
3) з»ҙдҝ®дҝқйҡңе·Ҙе…·е»әжЁЎ
еңЁиҷҡжӢҹз»ҙдҝ®иҝҮзЁӢд»ҝзңҹдёӯпјҢдҪҝз”Ёзҡ„з»ҙдҝ®дҝқйҡңе·Ҙе…·еҫҖеҫҖжІЎжңүзӣёе…іжЁЎеһӢпјҢйңҖиҰҒеҜ№иҝҷдәӣе·Ҙе…·иҝӣиЎҢиЎҘе……гҖӮз»ҙдҝ®е·Ҙе…·иҰҒе’Ңе®һйҷ…дёӯзҡ„зӣёеҗҢпјҢдё”е°әеҜёиҰҒжұӮзІҫзЎ®пјҢеҸҜд»ҘеҲ©з”Ёи°ғз ”еҸҠжҹҘйҳ…зҡ„еҶ…е®№пјҢеҜ№з»ҙдҝ®е·Ҙе…·иҝӣиЎҢи®ҫи®ЎпјҢжҢүз…§жӢҶеҚёеҜ№иұЎпјҢеҰӮиһәжҜҚзҡ„е°әеҜёпјҢе®ҢжҲҗе…ЁйғЁз»ҙдҝ®е·Ҙе…·зҡ„иҷҡжӢҹж ·жңәжһ„е»әпјҢеҰӮжҷ®йҖҡжүіжүӢгҖҒеңҶеӨҙжүіжүӢгҖҒеҘ—зӯ’жүіжүӢзӯүгҖӮ
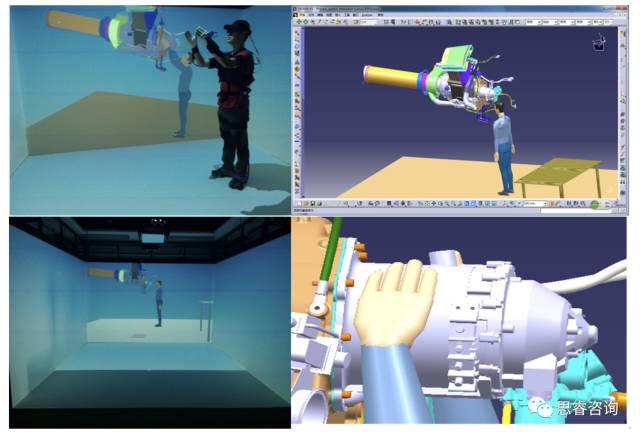
4.2иҷҡжӢҹз»ҙдҝ®д»ҝзңҹ
иҷҡжӢҹд»ҝзңҹеңәжҷҜжҳҜж №жҚ®дёҖе®ҡзҡ„з©әй—ҙеёғеұҖе…ізі»е°ҶиҷҡжӢҹз»ҙдҝ®ж ·жңәгҖҒз»ҙдҝ®е·Ҙе…·гҖҒиҷҡжӢҹдәәзӯүжЁЎеһӢж•ҙеҗҲеңЁиҷҡжӢҹзҺҜеўғд№ӢдёӯпјҢиҷҡжӢҹд»ҝзңҹеңәжҷҜжҳҜејҖеұ•з»ҙдҝ®жҖ§иҷҡжӢҹд»ҝзңҹзҡ„еҹәзЎҖгҖӮеңЁиҷҡжӢҹд»ҝзңҹеңәжҷҜдёӯиҷҡжӢҹдәәжҢүз…§з»ҙдҝ®е·ҘдҪңжөҒзЁӢиҝӣиЎҢз»ҙдҝ®ж“ҚдҪңпјҢеҪўжҲҗиҷҡжӢҹз»ҙдҝ®д»ҝзңҹж•°жҚ®пјҢз”Ёд»ҘеҗҺз»ӯзҡ„з»ҙдҝ®жҖ§еҲҶжһҗдёҺйӘҢиҜҒгҖӮ
5 иҷҡжӢҹз»ҙдҝ®еҲҶжһҗйӘҢиҜҒж–№жі•
иҷҡжӢҹз»ҙдҝ®еҲҶжһҗйӘҢиҜҒжҳҜеҖҹеҠ©дәҺиҷҡжӢҹзҺ°е®һзҡ„е№іеҸ°е·Ҙе…·ејҖеұ•дә§е“Ғзҡ„з»ҙдҝ®жҖ§еҲҶжһҗйӘҢиҜҒзҡ„ж–№жі•пјҢдё»иҰҒеҢ…жӢ¬еҸҜиҫҫжҖ§еҲҶжһҗгҖҒз©әй—ҙеёғеұҖеҲҶжһҗе’Ңз»ҙдҝ®е§ҝжҖҒеҲҶжһҗзӯүж–№йқўгҖӮдёӢйқўе°Ҷд»ҘеңЁиҷҡжӢҹз»ҙдҝ®еә”з”Ёиҫғдёәе№ҝжіӣзҡ„DELMIAе№іеҸ°дёәдҫӢпјҢеҜ№з»ҙдҝ®жҖ§еҲҶжһҗйӘҢиҜҒж–№жі•иҝӣиЎҢз®ҖиҰҒд»Ӣз»ҚгҖӮ
5.1еҸҜиҫҫжҖ§ж ёжҹҘ
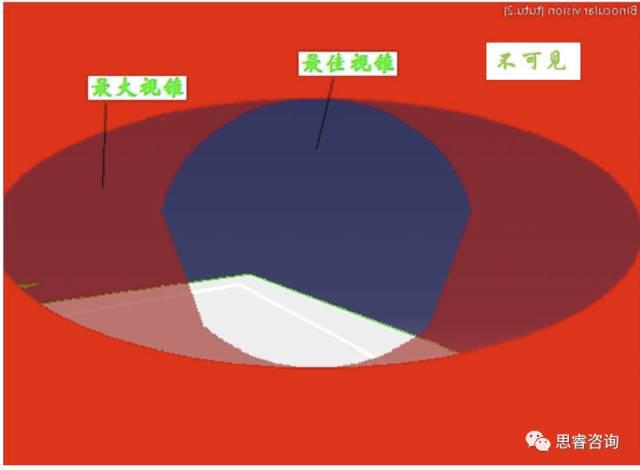
пјҲ1пјүи§ҶйҮҺеҸҜиҫҫжҖ§ж ёжҹҘ
з»ҙдҝ®дәәе‘ҳзҡ„еҸҜи§ҶжҖ§жҳҜжҢҮз»ҙдҝ®йғЁдҪҚеңЁз»ҙдҝ®дәәе‘ҳи§ҶзәҝеҸҜд»ҘиҫҫеҲ°зҡ„иҢғеӣҙеҶ…пјҢдҪҝз»ҙдҝ®дәәе‘ҳж–№дҫҝең°иҝӣиЎҢз»ҙдҝ®жҙ»еҠЁгҖӮ
DELMIAдёӯзҡ„и§Ҷй”ҘеҲҶжһҗйҖҡиҝҮзЎ®е®ҡдәәзңјз”ҹзҗҶи§ҶйҮҺеҢәеҹҹпјҢеҫ—еҲ°дәәзңји§Ҷзәҝзҡ„еҸҜи§Ҷй”ҘпјҢж №жҚ®з»ҙдҝ®йғЁдҪҚеңЁеҸҜи§Ҷй”Ҙдёӯзҡ„еҲҶеёғдҪҚзҪ®жқҘеҜ№з»ҙдҝ®йғЁдҪҚзҡ„еҸҜи§ҶжҖ§иҝӣиЎҢиҜ„д»·пјҢеҰӮдёӢеӣҫгҖӮйҡҸзқҖдәәдҪ“зҡ„иҝҗеҠЁпјҢи§ҶйҮҺзӘ—еҶ…зҡ„еӣҫжҷҜиҝһз»ӯең°еҸ‘з”ҹеҸҳеҢ–пјҢд»ҘжӯӨеҸҜд»ҘеҲӨе®ҡз»ҙдҝ®ж—¶еҸҜи§ҶжҖ§жҳҜеҗҰиүҜеҘҪгҖӮ
пјҲ2пјүе®һдҪ“еҸҜиҫҫжҖ§ж ёжҹҘ
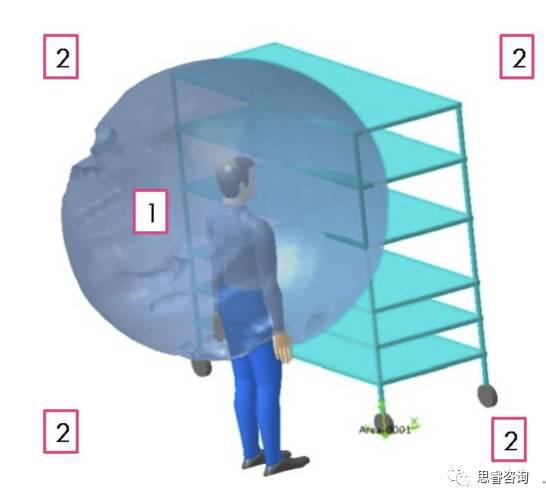
з»ҙдҝ®дәәе‘ҳзҡ„е®һдҪ“еҸҜиҫҫжҖ§жҳҜжҢҮе·Ҙе…·жҲ–жүӢиғҪеӨҹжІҝдёҖе®ҡи·Ҝеҫ„жҲ–ж–№ејҸпјҢжҺҘиҝ‘з»ҙдҝ®йғЁдҪҚгҖӮе®һдҪ“еҸҜиҫҫжҖ§иҜ„д»·еҮҶеҲҷиҖғиҷ‘дәҶз»ҙдҝ®дәәе‘ҳеңЁз»ҙдҝ®иҝҮзЁӢдёӯи°ғж•ҙе§ҝжҖҒпјҢз»ҙдҝ®еҜ№иұЎиғҪеҗҰеңЁз»ҙдҝ®дәәе‘ҳзҡ„жүӢйғЁеҢ…з»ңзҗғиҢғеӣҙеҶ…пјҢиҝҷдёҖиҝҮзЁӢзҡ„е®һзҺ°жҳҜйҖҡиҝҮDELMIAдёӯзҡ„еҢ…з»ңзҗғе·Ҙе…·жқҘе®һзҺ°гҖӮ
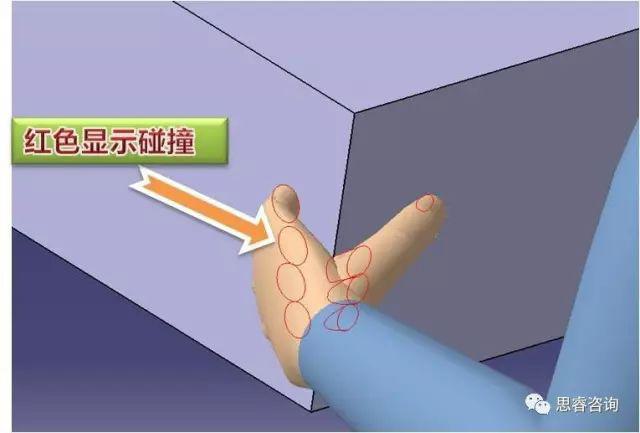
пјҲ3пјүж“ҚдҪңз©әй—ҙеҸҜиҫҫжҖ§ж ёжҹҘ
ж“ҚдҪңз©әй—ҙиҜ„д»·еҮҶеҲҷиҖғиҷ‘дәҶз»ҙдҝ®дәәе‘ҳеңЁиҝӣиЎҢж“ҚдҪңж—¶пјҢжүӢйғЁжҲ–иҖ…е·Ҙе…·жҳҜеҗҰжңүи¶іеӨҹзҡ„з©әй—ҙпјҢжҳҜеҗҰе’Ңе‘Ёеӣҙзҡ„и®ҫеӨҮеҸ‘з”ҹдәҶзў°ж’һпјҢиҝҷдёҖиҝҮзЁӢзҡ„е®һзҺ°йҖҡиҝҮDELMIAдёӢзҡ„зў°ж’һжЈҖжөӢе·Ҙе…·е’ҢжөӢйҮҸе·Ҙе…·жқҘе®һзҺ°гҖӮ
5.2з©әй—ҙеёғеұҖж ёжҹҘ
еёғеұҖи®ҫи®ЎеҸҜжҸҸиҝ°дёәдёҖзі»еҲ—组件жүҫеҲ°дёҖз§ҚжҺ’еҲ—пјҢдҪҝе…¶жң¬иә«е’ҢеңЁе…¶дёҠзҡ„ж“ҚдҪңж»Ўи¶ідёҖз»„зәҰжқҹжқЎд»¶гҖӮзәҰжқҹжқЎд»¶еҢ…жӢ¬дёҚеёҰжҖ§иғҪзҡ„зәҰжқҹе’ҢеёҰжҖ§иғҪзҡ„зәҰжқҹпјҢеүҚиҖ…дёҖиҲ¬иҰҒжұӮеҫ…еёғзү©д№Ӣй—ҙгҖҒеҫ…еёғзү©дёҺе®№еҷЁд№Ӣй—ҙдёҚе№Іж¶үпјҢ并е°ҪйҮҸжҸҗй«ҳз©әй—ҙеҲ©з”ЁзҺҮпјӣеҗҺиҖ…дёҖиҲ¬иҰҒиҖғиҷ‘жғҜжҖ§гҖҒе№іиЎЎжҖ§гҖҒзЁіе®ҡжҖ§гҖҒжҢҜеҠЁгҖҒзЈҒеңәгҖҒжё©еәҰеңәзӯүзәҰжқҹгҖӮ
5.3дәәзҙ ж ёжҹҘ
дәәзҙ е·ҘзЁӢзҡ„иҜ„д»·еҮҶеҲҷиҖғиҷ‘дәҶз»ҙдҝ®иҝҮзЁӢдёӯдәәе‘ҳзҡ„иҲ’йҖӮзЁӢеәҰеҸҠз–ІеҠізЁӢеәҰпјҢиҝҷдёҖиҝҮзЁӢзҡ„е®һзҺ°йҖҡиҝҮDELMIAзҺҜеўғдёӢзҡ„RULAе·Ҙе…·жқҘе®һзҺ°гҖӮйҖҡиҝҮдәәдҪ“дёҚеҗҢйўңиүІиЎЁеҫҒеҗ„иӮўдҪ“дёҚеҗҢзӯүзә§зҡ„з–ІеҠізЁӢеәҰгҖӮ

6 еұ•жңӣ
иҷҡжӢҹз»ҙдҝ®дҪңдёәдёҖй—Ёж–°е…ҙзҡ„科еӯҰжҠҖжңҜпјҢе№ҝжіӣзҡ„еә”з”ЁйўҶеҹҹиҜҒжҳҺдәҶе…¶е·ЁеӨ§зҡ„еүҚжҷҜе’ҢеҸ‘еұ•жҪңеҠӣпјҢдҪҶжҳҜиҷҡжӢҹз»ҙдҝ®жҠҖжңҜиҝҳеӯҳеңЁдёҖдәӣдёҚи¶іпјҢйңҖиҰҒиҝӣдёҖжӯҘж·ұе…Ҙз ”з©¶дёҺе®Ңе–„пјҢдё»иҰҒиЎЁзҺ°еңЁд»ҘдёӢеҮ дёӘж–№йқўпјҡ
дәәжңәдәӨдә’
дәәжңәдәӨдә’жҠҖжңҜдёҖзӣҙжҳҜиҷҡжӢҹз»ҙдҝ®жҠҖжңҜдёӯз ”з©¶зҡ„зғӯзӮ№й—®йўҳпјҢиҷҪ然已з»ҸжҸҗеҮәдәҶеҫҲеӨҡж–№жі•пјҢдҪҶеңЁзӣ®еүҚзҡ„иҷҡжӢҹз»ҙдҝ®зі»з»ҹдёӯпјҢеӨ§еӨҡж•°жғ…еҶөдёӢиҖғиҷ‘зҡ„жҳҜз”ЁжҲ·е’ҢзҺҜеўғд№Ӣй—ҙзҡ„дәӨдә’пјҢиҫғе°‘иҖғиҷ‘зү©дҪ“й—ҙзҡ„иҮӘ然дәӨдә’иЎҢдёәгҖӮ
йҖҡз”ЁеҢ–иҰҒжұӮ
иҷҡжӢҹз»ҙдҝ®жҠҖжңҜж¶үеҸҠйўҶеҹҹе№ҝпјҢеҗ„еә”з”ЁйўҶеҹҹеҜ№дә§е“Ғзҡ„и®ҫи®ЎдҪҝз”ЁиҰҒжұӮдёҚе°ҪзӣёеҗҢпјҢеҜ№иҝҷдәӣиҰҒжұӮе’Ң规иҢғз»јеҗҲеҲҶжһҗпјҢж”№иҝӣиҷҡжӢҹз»ҙдҝ®иҝҮзЁӢ规еҲ’е’ҢжҸҸиҝ°ж–№жі•пјҢжҸҗеҮәеҗҲзҗҶзҡ„иҷҡжӢҹз»ҙдҝ®еҚҸеҗҢи®ҫи®ЎеҮҶеҲҷжҳҜеҸ‘еұ•зҡ„еҝ…然гҖӮ
з»ҙдҝ®д»ҝзңҹдәӨдә’е®һж—¶жҖ§
иҷҡжӢҹз»ҙдҝ®жҠҖжңҜеҸ—еҲ¶дәҺиҷҡжӢҹзҺ°е®һ硬件жҠҖжңҜзҡ„еҸ‘еұ•пјҢзӣ®еүҚеңЁз»ҙдҝ®жҖ§д»ҝзңҹиҝҮзЁӢдёӯиЎЁзҺ°зҡ„е®һж—¶жҖ§иҫғе·®пјҢз»ҙдҝ®дәәе‘ҳдёҺиҷҡжӢҹдәәд№Ӣй—ҙзҡ„з»ҙдҝ®еҠЁдҪңж—¶й—ҙ延иҝҹиҫғеӨ§пјҢйңҖиҰҒйҖҡиҝҮжҸҗй«ҳеҠЁдҪңжҚ•жҚүзі»з»ҹеҸҠе…¶е№іеҸ°зҡ„жҖ§иғҪжҸҗй«ҳз”ЁжҲ·дҪ“йӘҢдёҺд»ҝзңҹж•ҲзҺҮгҖӮ


й•ҝжҢүдәҢз»ҙз ҒиҜҶеҲ«е…іжіЁжҲ‘们